Le hall d’exposition du Landesgartenschau de Schwäbisch Gmünd en Allemagne revendique d’être la première construction dont la structure et l’enveloppe principale sont entièrement composées de plaques de bois de 5 cm d’épaisseur créées par des robots. Haute de 17 m, la structure inspirée du squelette des oursins est faite de plus de 240 segments de contreplaqué de hêtre de provenance régionale. Leur fabrication n’a exigé que 12 m³ de bois de construction dont les chutes ont été utilisées pour le revêtement de sol. Le bâtiment d’une surface de 250 m² se compose de deux dômes accolés qui lui donnent sa forme d’arachide.

Schwäbisch Gmünd – Exhibition Hall | photo by ICD/ITKE/IIGS university stuttgart
Conception / Modélisation
Tout d’abord le processus de développement du projet a été la génération. A partir de la forme, les outils informatiques ont permis l’optimisation de la distribution et de la taille des éléments qui constituent la coque.
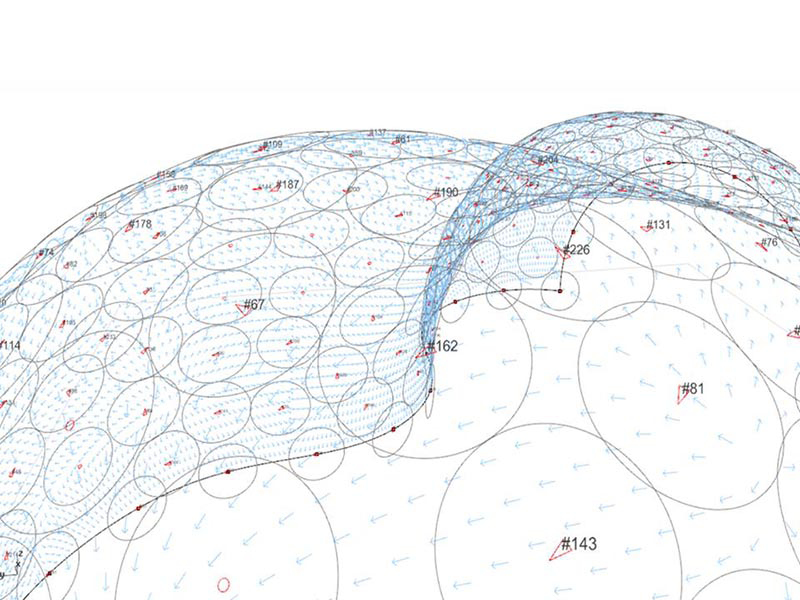
Optimisation des éléments
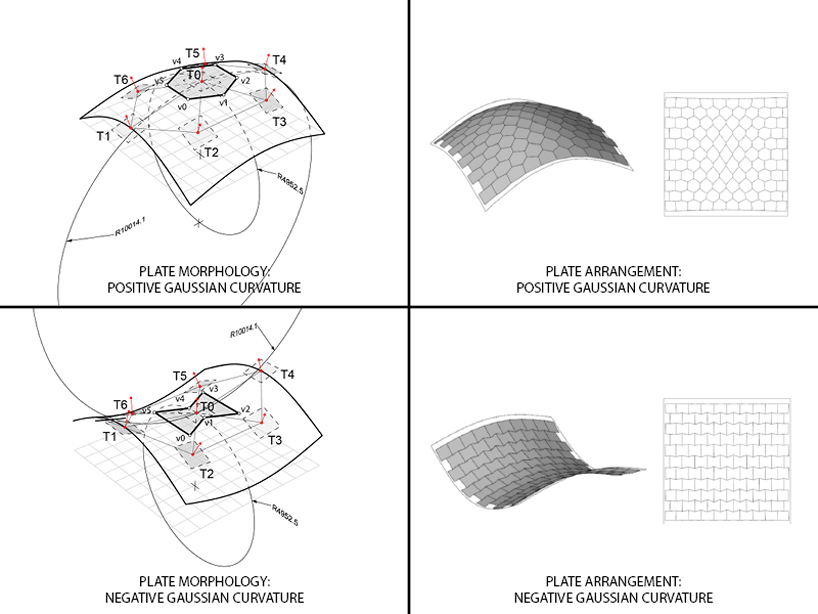
Définition de la forme de chaque élément
Cette optimisation a permis une discrétisation optimale de la forme en éléments plats qui forment les double-courbure positive et négative.
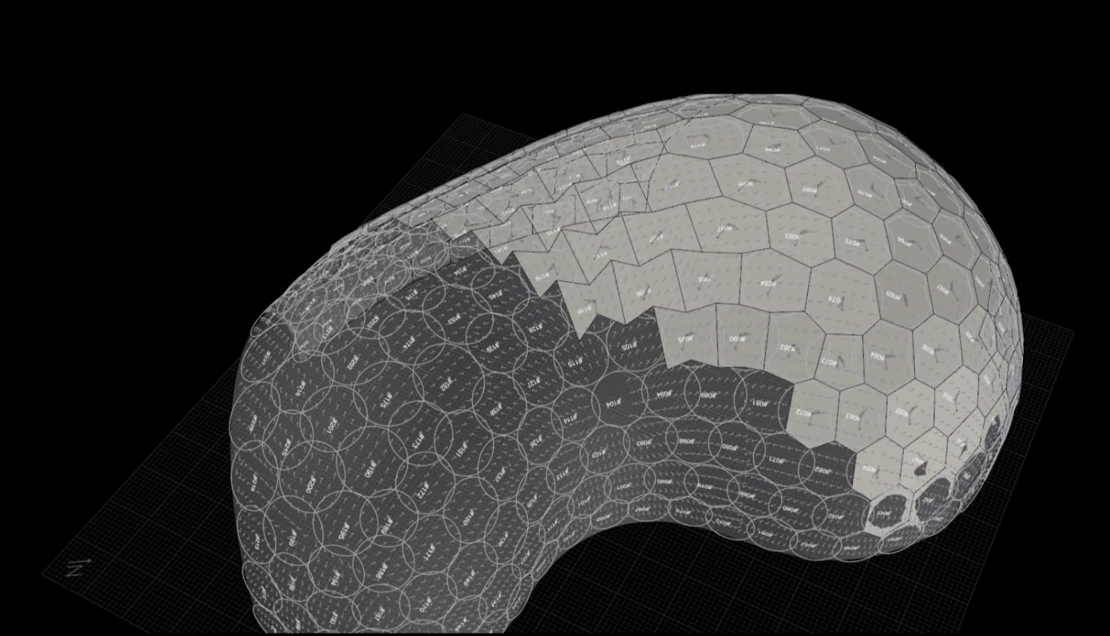
Génération d’un maillage optimale pour les doubles courbures.
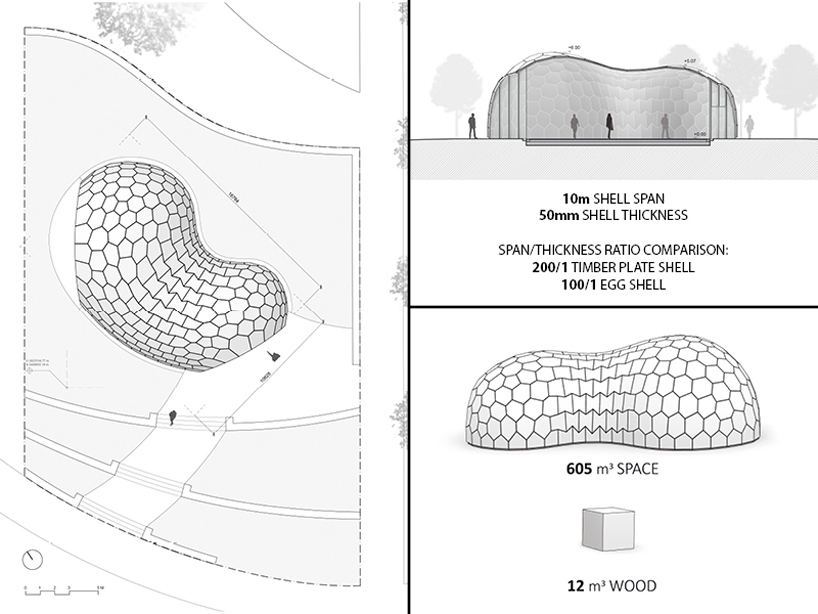
Dessin final du projet avec le maillage définitif et la relation de la surface construite et le volume de bois utilisé
Conception / Assemblage
La génération a été présente dans la conception de l’assemblage de l’emboîtement des encoches des 243 pièces du puzzle. Prenant en considération les caractéristiques structurelles de la forme et du matériau de cette structure, la simulation a permis la vérification du fonctionnement de l’ensemble de la structure avec les relations des forces sur chaque encoche. Etant donné que les encoches ne sont pas dessinées pour supporter des efforts de traction, des petites entailles ont été dessinées pour pouvoir recevoir des vis.
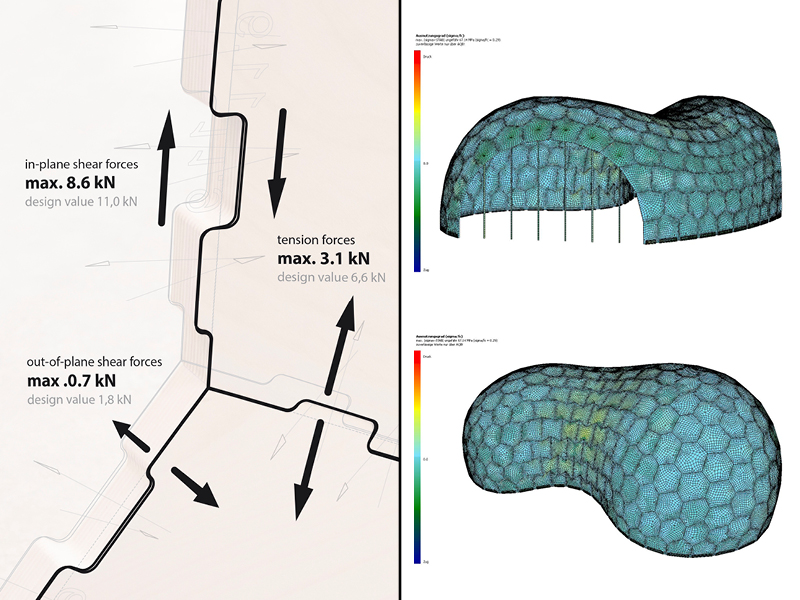
Simulation et évaluation du fonctionnement structurel.
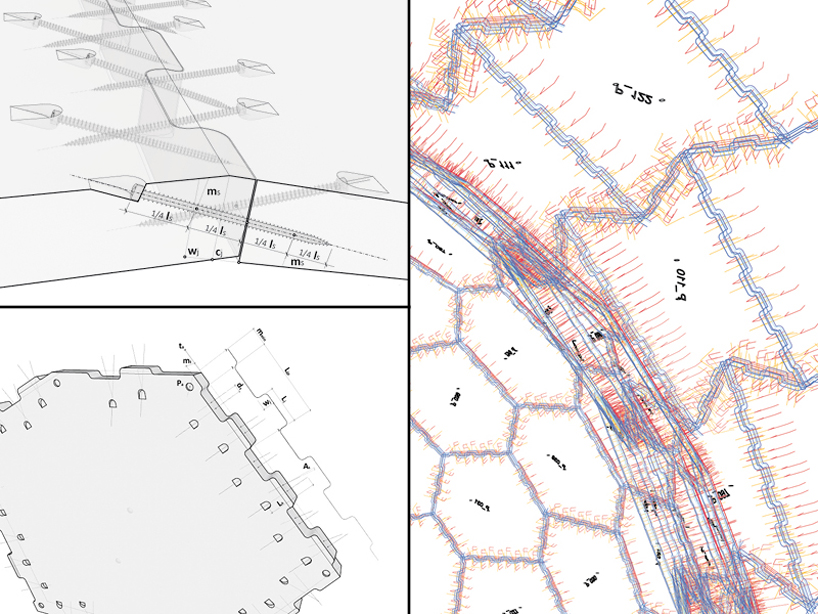
Détail de la conception des assemblages
Matérialisation / Fabrication
La matérialisation de chaque élément a été divisé en deux parties. Dabord il y a eu un découpage des plaques de bois contreplaque pour dessiner la forme de chaque pièce (découpage à une axe verticale) et en suite le sculptage des 7600 encoches avec le robot Kuka de 6 axes.

Découpage automatisé de la forme de chaque élément
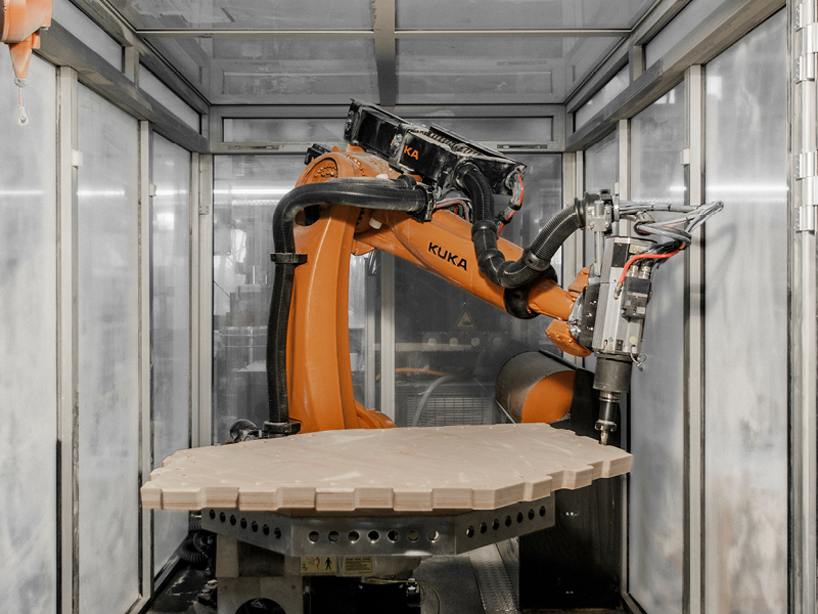
Robot KUKA a 6 axes
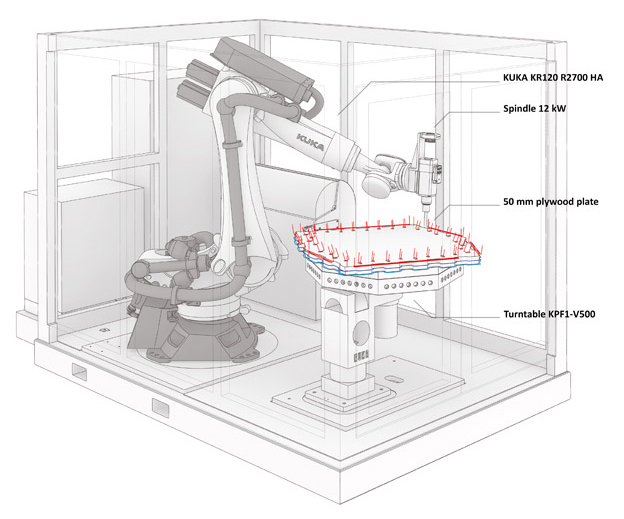
Configuration du robot

La précision du robot réduit considérablement la marge d’erreur.
Matérialisation / Assemblage
Une fois sur place, l’assemblage des éléments a été faite manuellement à l’aide d’une structure temporaire pour soutenir les pièces au cour de l’assemblage et à l’aide d’une grue pour permettre le déplacement et la mise en place des éléments.

Mise en place manuelle des éléments

Fixation des éléments par vis

Structure temporaire pour permettre l’assemblage des éléments.
project team:
ICD institute for computational design: prof. a. menges (PI), tobias schwinn, oliver david krieg
ITKE institute of building structures and structural design: prof. j. knippers, jian-min li
IIGS institute of engineering geodesy: prof. volker schwieger, annette schmitt
müllerblaustein holzbau gmbh: reinhold müller, benjamin eisele
KUKA roboter gmbh: alois buchstab, frank zimmermann
landesbetrieb forst baden-württemberg: sebastian schreiber, frauke brieger
landesgartenschau schwäbisch gmünd 2014 gmbh: karl-eugen ebertshäuser, sabine rieger
sources consulté le 24/10/2014 :
http://www.designboom.com/architecture/robotically-fabricated-landesgartenschau-exhibition-hall-06-25-2014/
http://vimeo.com/
http://icd.uni-stuttgart.de/?p=11173
http://www.domusweb.it/en/architecture/2014/06/26/landesgartenschau_exhibition_hall.html
http://www.kuka-robotics.com/france/fr/products/industrial_robots/special/high_accuracy_robots/kr120_r2700_extra_ha/